DC-motor driver | Motoron | UART | Icont out per chan: 1.6A | Ch: 2

Sensor: atmospheric | air quality | I2C | 3.3÷5VDC | IC: SGP40

Stepper motor controller | DRV8825 | 1.5A | Uin mot: 8.2÷45V

Sensor: distance | ultrasonic | 3.3÷5VDC | PWM,UART,analog | 0÷7650mm
Sensor: accelerometer | 3.3VDC | I2C,SPI | H3LIS200DL | ±100g,±200g
Stepper motor controller | TB67S128FTG | SPI | 2.1A | Uin log: 2÷5.5V

Sensor: accelerometer | 3.3÷5VDC | I2C | LIS331HH | ±6g,±12g,±24g
DC-motor driver | Motoron | UART | Icont out per chan: 1.6A | Ch: 2
Converter: step down | Uout: 9V | Uin: 11÷42V | 300mA | 80÷90% | 13x10mm

Module robotics: controller | 3.3÷5VDC | WiFi | uC: ESP32-S2-WROOM
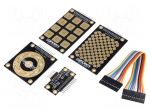
Sensor: touch | analog | 5V | Kit: 4 keyboards,adapter,wire jumpers

Sensor: temperature | infrared | I2C,digital | 3.3÷5VDC | Gravity
Sensor: gas level | hydrogen (H2) | 3.3÷5VDC | 13x13x2.5mm | -10÷50°C
Sensor: current | 4.5÷5.5VDC | IC: ACS724 | 20.3x17.8mm | I DC: -50÷50A

Converter: step up / step down | Uout: 9V | Uin: 2.8÷22V | 2.5A | 85%
Module robotics: controller | module,connectors | 2.5÷16VDC | OUT: 4

Motor: servo | 4.8÷6VDC | micro | analogue | 6g | 20x8.3x19.3mm | plastic

Converter: step up / step down | Uout: 12V | Uin: 2.8÷22V | 2.5A | 85%