

Sensor: atmospheric | temperature,humidity | I2C | 3.3÷5.5VDC | Ch: 1
Stepper motor controller | TB67S279FTG | 1.7A | Uin mot: 10÷47V

Module: relay | Channels: 1 | 5VDC | max.250VAC | 16A | screw | TTL

Tracks | black | Shaft: D spring | Pcs: 2 | push-in,screw | Ø: 35mm

Left wheel | black | screw | Ø: 97mm | Plating: rubber | W: 44.9mm | 1pcs.

Module robotics: camera | Resolution: 640x480px | 5VDC | USB
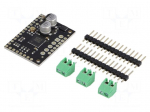
DC-motor driver | Motoron | UART | Icont out per chan: 1.8A | Ch: 1
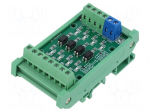
Module robotics: converter | logic level shifter | 5VDC | 12V | 5VAC

Stepper motor controller | TB67S279FTG | 1.1A | Uin mot: 10÷47V
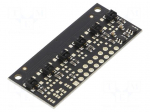
Sensor: distance | reflective | 2.9÷5.5VDC | analog | Channels: 6
Sensor: distance | laser,time-of-flight (ToF) | I2C | 2.7÷3.3VDC

Motor: DC | with gearbox | 12VDC | 2.19A | Shaft: D spring | 45rpm

Sensor: water quality | TDS | 3.3÷5VDC | Kit: module,cables,probe
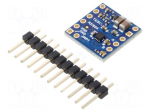
Sensor: current | 3÷3.6VDC | IC: ACS72981LLRATR-050B3 | 35.5x30.4mm
Sensor: current | 3÷3.6VDC | IC: ACS72981LLRATR-050U3 | 35.5x30.4mm
Sensor: current | 3÷3.6VDC | IC: ACS72981LLRATR-100B3 | 35.5x30.4mm
Sensor: current | 4.5÷5.5VDC | IC: ACS72981LLRATR-100B5 | -100÷100A
Sensor: current | 4.5÷5.5VDC | IC: ACS72981LLRATR-100U5 | 0÷100A
Sensor: current | 3÷3.6VDC | IC: ACS72981KLRATR-150B3 | 35.5x30.4mm